6DOF Rocket Simulator & Design Studio
An interactive 6-degrees-of-freedom (6-DOF) rocket simulator built in Python that provides a comprehensive platform for designing rockets from core components, defining propulsion systems, and launching them in a 3D environment governed by high-fidelity physics models. This simulator serves as a “virtual wind tunnel” and launchpad for understanding the critical relationship between rocket design, aerodynamic stability, and flight paths.
🚀 Key Features
Interactive Rocket Design
- Real-time Design: Adjust sliders to visually and physically modify rocket dimensions in real-time
- Geometric Parameters: Modify body diameter, length, nose cone dimensions, and fin geometry
- Automatic Calculations: Dry mass, center of gravity, center of pressure, and rotational inertia automatically recalculated
Full 6-DOF Physics Engine
- Complete Motion Simulation: Both translational (X, Y, Z position) and rotational (pitch, yaw, roll) motion
- High-Precision Integration: RK45 (Runge-Kutta-Fehlberg) adaptive step-size solver for accurate results
- Automatic Termination: Simulation terminates precisely upon ground impact using solver events
High-Fidelity Aerodynamics & Stability
- Dynamic Drag Modeling: Drag coefficient calculated at every time step based on current Mach number
- Transonic Effects: Models critical transonic drag rise phenomenon
- Stability Analysis: Realistic aerodynamic restoring torque prevents non-physical behavior
- Center of Pressure/Gravity: Dynamic interaction between CP and CG for authentic flight characteristics
Atmospheric Modeling
- Standard Atmosphere: Implements 1976 U.S. Standard Atmosphere model
- Realistic Properties: Accurate temperature, pressure, density, and speed of sound vs. altitude
- Critical for Accuracy: Essential for precise drag and Mach number calculations
Interactive 3D Visualization
- High-Performance Rendering: Smooth, high-framerate 3D visualization using PyVista
- Dense Output Integration: Continuous state interpolation for fluid animation
- Multiple Camera Modes:
- Chase Camera: Dynamically follows the rocket
- Fit Trajectory: Shows entire flight path
- Free Look: User-controllable camera with mouse interaction
- Visual Effects: Active thrust plume during engine burn and apogee marker
Customizable Propulsion & Launch
- Engine Parameters: Set fuel mass, thrust, and specific impulse (Isp)
- Burn Time Estimation: Real-time calculation based on propulsion parameters
- Thrust Misalignments: X/Y-axis thrust vectoring to simulate manufacturing imperfections
- Launch Conditions: Configurable initial pitch angle from vertical
Variable Simulation Speed
- Playback Control: Real-time, slow-motion, or fast-forward analysis
- Interactive Analysis: Pause, rewind, and study specific flight phases
📐 Physics & Engineering Model
State Vector (13 Elements)
The complete rocket state captured in vector y:
- Mass (m): Current total mass in kg
- Position (x_N): Inertial position [x, y, z] in meters
- Velocity (v_N): Inertial velocity [vx, vy, vz] in m/s
- Attitude (sigma_BN): 3-element Modified Rodrigues Parameters (MRP) vector
- Angular Velocity (omega_BN): Body-frame angular velocity [wx, wy, wz] in rad/s
Equations of Motion
Translational Dynamics (Newton’s Second Law)
v̇ = F_net / m
Force Components:
- Gravity (F_g): Constant downward vector [0, 0, -g₀]
- Thrust (F_thrust): Engine thrust rotated from body to inertial frame using attitude matrix
- Drag (F_drag): Opposes velocity relative to atmosphere using dynamic drag coefficient
Rotational Dynamics (Euler’s Equations)
ω̇ = I⁻¹ × (M_net - ω × (I × ω))
Torque Components:
- Thrust Torque (M_thrust): From misaligned thrust vectors
- Aerodynamic Torque (M_aero): Restoring torque for stability (see detailed model below)
Advanced Physical Models
Atmospheric Properties (1976 U.S. Standard Atmosphere)
- Temperature:
T = T₀ - L × h(linear lapse rate in troposphere) - Pressure:
P = P₀ × (1 - L×h/T₀)^(g₀/(R×L)) - Density:
ρ = P/(R×T) - Speed of Sound:
a = √(γ×R×T)
Mach-Dependent Drag Coefficient
- Dynamic Calculation: Linear interpolation over Mach number lookup table
- Transonic Rise: Models significant drag increase near Mach 1.0
- Realistic Behavior: Typical model rocket aerodynamic characteristics
Aerodynamic Stability Model
- Angle of Attack (α): Angle between velocity vector and rocket axis
- Normal Force:
F_normal = q × A_ref × C_Nα × sin(α)whereqis dynamic pressure - Center of Pressure: Geometric estimation from rocket design
- Dynamic CG: Real-time calculation accounting for fuel consumption
- Restoring Torque:
M_aero = (r_cp - r_cg) × F_normal(stabilizing effect)
Attitude Representation (Modified Rodrigues Parameters)
- Singularity-Free: Avoids gimbal lock issues of Euler angles
- Computationally Efficient: Minimal parameters for 3D rotations
- Conversion Functions: MRP ↔ Direction Cosine Matrix transformations
🖥️ Project Structure
| File | Purpose |
|---|---|
visualizer.py |
Main GUI application, 3D scene setup, user interaction, animation loop |
dynamics.py |
Core physics engine, ODE system, atmospheric/aerodynamic models |
helpers.py |
Attitude mathematics utilities (MRPs, DCMs, rotations) |
main.py |
Legacy basic plotting functionality (superseded by visualizer) |
requirements.txt |
Python package dependencies |
Core Technologies:
- PyQt5: Graphical user interface framework
- PyVista: High-performance 3D rendering and visualization
- SciPy: Numerical integration and scientific computing
- NumPy: Vector mathematics and array operations
🚀 Quick Start Guide
Installation
# Clone repository
git clone https://github.com/daglar510/rocket_sim_6dof.git
cd rocket_sim_6dof
# Create virtual environment
python -m venv .venv
# Activate environment (Windows)
.venv\Scripts\activate
# Activate environment (macOS/Linux)
source .venv/bin/activate
# Install dependencies
pip install -r requirements.txt
# Launch simulator
python visualizer.py
User Interface Overview
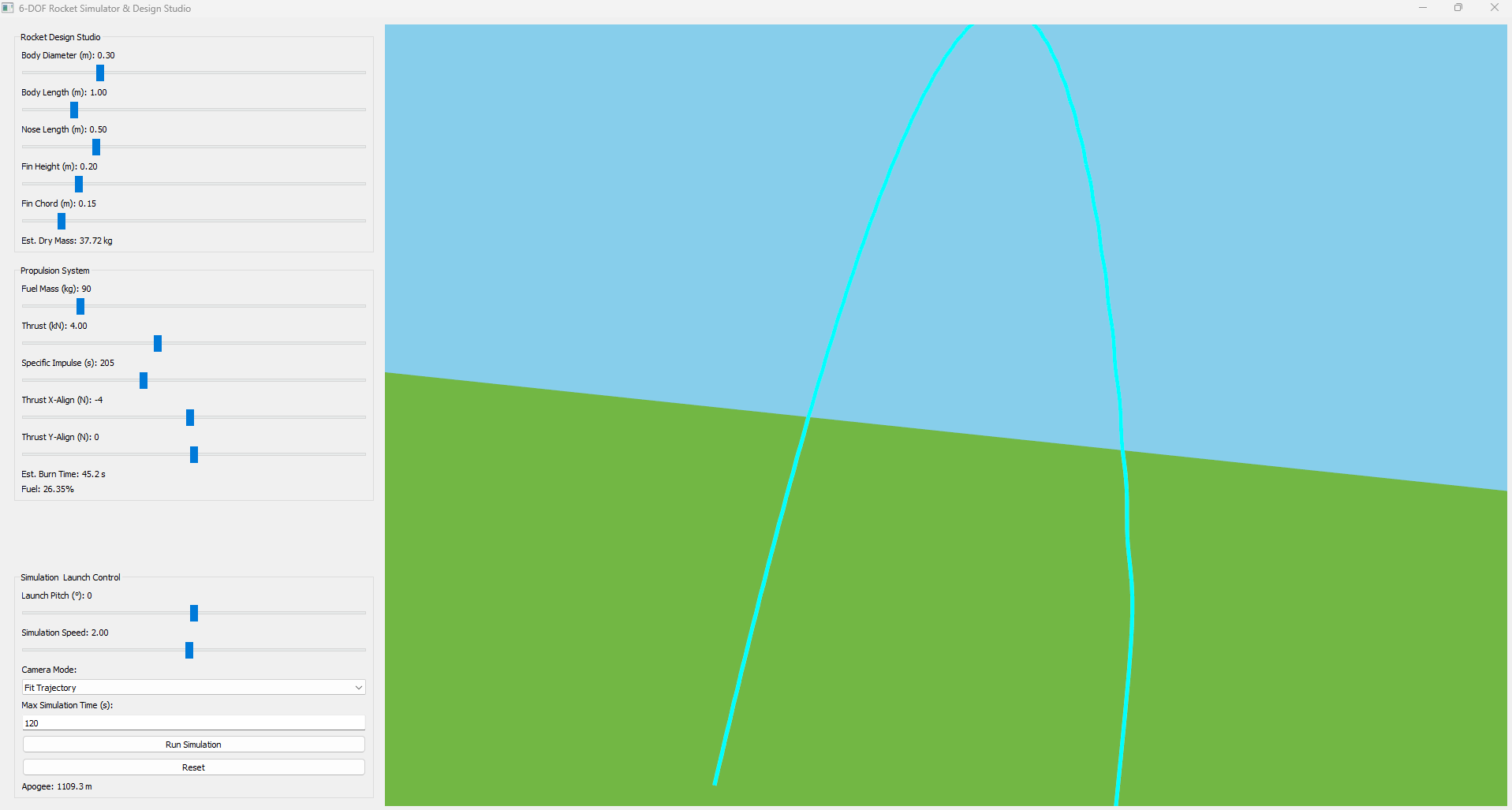
Left Panel - Design Studio:
- Rocket geometry sliders with real-time 3D preview
- Propulsion system configuration
- Launch parameters and simulation controls
Right Panel - 3D Visualization:
- Interactive 3D rocket model and trajectory
- Multiple camera modes and controls
- Real-time flight parameter display
📊 Simulation Workflow
- Design Phase: Use sliders to configure rocket geometry and propulsion
- Pre-flight Check: Review estimated mass, CG/CP positions, burn time
- Launch Configuration: Set initial pitch angle and thrust misalignments
- Camera Selection: Choose viewing mode for analysis
- Simulation Execution: Run with variable speed control
- Post-flight Analysis: Study trajectory, stability, and performance
🎯 Educational Applications
Learning Objectives
- Rocket Design Principles: Understand geometric effects on stability and performance
- Physics Integration: Experience 6-DOF motion in realistic environment
- Aerodynamic Concepts: Visualize stability derivatives and control authority
- Propulsion Effects: Analyze thrust vectoring and misalignment consequences
- Atmospheric Influences: Study altitude-dependent aerodynamic phenomena
Research Applications
- Design Optimization: Parametric studies of rocket configurations
- Stability Analysis: Monte Carlo analysis of design robustness
- Control System Development: Test guidance and control algorithms
- Educational Tool: Interactive learning platform for aerospace engineering
🔧 Technical Specifications
System Requirements
- Python Version: 3.8 or higher
- Memory: 8GB RAM minimum (16GB recommended)
- Graphics: Dedicated GPU recommended for 3D visualization
- Operating System: Windows, macOS, or Linux
Performance Characteristics
- Integration Method: Adaptive Runge-Kutta-Fehlberg (RK45)
- Time Step Control: Automatic error-based step size adjustment
- Dense Output: Continuous state interpolation for smooth animation
- Event Detection: Precise ground impact termination
Accuracy Features
- High-Order Integration: 4th/5th order embedded RK method
- Adaptive Stepping: Automatic refinement in critical flight phases
- Physical Consistency: Mass conservation and realistic aerodynamic behavior
- Numerical Stability: Robust attitude integration using MRPs
📚 Dependencies
numpy>=1.21.0
scipy>=1.7.0
pyvista>=0.35.0
PyQt5>=5.15.0
vtk>=9.1.0
👨💻 Development & Support
- Lead Developer: Dağlar Duman
- Institution: Aerospace Engineering Research
- License: MIT License - Open source for educational and research use
- Repository: GitHub
-
Contact: Email LinkedIn
⚠️ Important Notes
- Educational Purpose: Designed for learning and research, not certified flight software
- Simplified Models: Some phenomena approximated for computational efficiency
- Validation Recommended: Cross-verify results with multiple analysis tools
- Export Compliance: Ensure compliance with local regulations for aerospace technology
This 6DOF rocket simulator represents comprehensive aerospace engineering research and development, combining advanced physics modeling with interactive visualization for educational and research purposes. Contributions and collaborations welcome!